| |
|||
| HSG |
|
Ansteuerung der seriellen Schnittstelle mit Hilfe der Windows API
Dokumentation zu TCOMPort
Problemstellung
Das Problem ist es die serielle Schnittstelle des Computers mit Hilfe einer Klasse, die in Delphi bzw. mit PASCAL geschrieben werden soll, anzusprechen und steuern zu können.Zuerst solle man sich über die Funktionsweise der seriellen Schnittstelle des Computers ein bisschen im Klaren sein. Eine gewisse Einführung gibt die folgenden Links:
http://www.ats-vienna.com/rs232.php und http://de.wikipedia.org/wiki/RS-232
Die Belegung der Schnittstellenpins und deren Bedeutung
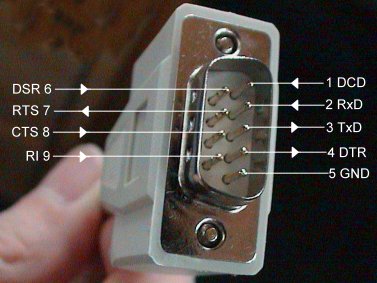
| Pin Nr. | Name | Eing./Ausg. | Beschreibung |
|---|---|---|---|
| 1 | DCD | E | Data Carrier Detect - Ein Gerät signalisiert dem Computer, dass es Daten auf der Leitung erkennt |
| 2 | RxD | E | Receive Data - Datenleitung zum Empfangen von Daten |
| 3 | TxD | A | Trasmit Data - Datenleitung zum Senden von Daten |
| 4 | DTR | A | Data Terminal Ready - Über diese Leitung kann ein Gerät eingeschaltet oder zurückgesetzt werden. (Üblicherweise schaltet ein Gerät z.B. Modem diese Leitung auf DSR durch, wenn es einsatzbereit ist) |
| 5 | GND | - | Ground - Masse |
| 6 | DSR | E | Data Set Ready - Angeschlossenes Gerät ist Online (s.o.) |
| 7 | RTS | A | Request To Send - Sender signalisiert, dass er senden möchte |
| 8 | CTS | E | Clear To Send - Empfänger signalisiert, dass er bereit ist Daten zu empfangen |
| 9 | RI | E | Ring Indicator - Klingelzeichen-Indikator, meist nur für Modems verwendet |
Es ist zu bemerken, dass für die eigentliche Datenübertragung nur die Pins Rxd zum Empfangen, Txd zum Senden und GND, die Masse, benötigt werden. Die restlichen Leitungen sind primär dazu da, die Verbindung zwischen Computer und Gerät zu sichern und Datenverlust durch unvorbereitetes Senden (z.B. Pufferüberlauf) zu vermeiden. Weiterhin sind diese Leitungen, die man übrigens "Handshake-Leitungen" (man stelle sich zwei Geschäftspartner vor die sich die Hand reichen bevor sie Geschäfte machen) bzw. Steuerleitungen nennt, sehr gut zum Aufbauen einfacher Schaltungen. Aber das ist ein anderes Thema, das hier nichtweiter behandelt werden soll...
Zurück zur Problemstellung: Einführung zum Ansteuern der seriellen Schnittstelle mit der Windows API
Das Ansprechen der seriellen Schnittstelle unter Windows ist eigentlich gar nicht so schwer wie man es sich vorstellt. Als 'Unwissender' stellt man sich endlose Zeilen von Programmcode mit vielen, vielen unleserlichen Zeichen vor, doch um eine serielle sehr einfach anzusprechen brauch man knapp eine Bildschirmseite (17") Programmcode.Zuerst müssen wird verstehen wie Windows überhaupt die serielle Schnittstelle anspricht. Mit Windows 95 (und aufwärts) ist es so, dass man nicht direkt mit Maschinenbefehlen bzw. konventionellen Mitteln an die serielle Schnittstelle herankommt; Windows zieht es vor den COM-Port selbst zu verwalten. Damit wir Programmierer überhaupt nun an den Windows-verwalteten Port herankommen, gibt es das sogenannte API (Application Programming Interface). Dies erlaubt uns mit einfachen Befehlen über Windows Zugriff auf die COM-Ports zu verschaffen.
Dabei werden die Schnittstellen wie schon gesagt nicht direkt angesprochen, sondern über sog. 'Dateihandles'. Handles sind einfach gesprochen Zeiger auf eine Datei bzw. ein Gerät mit dem man verschiedene Operationen durchführen kann. So gesehen wird unser COM-Port also wie eine Datei behandelt, aus der wir etwas lesen können und in die wir etwas schreiben können. Die einer Datei fremden Steuerleitungen können über gesonderte API-Befehle gesetzt, bzw. abgefragt werden.
Doch nun zur Klasse TCOMPort.
Die Klasse TCOMPort
unit uCOMPort;
interface
uses Windows, SysUtils;
const
//--Konstanten für den Statusreport------------------------------------------------------------
parity : array[0..4] of String = ('Keine','Ungerade','Gerade','Markierung','Leerzeichen');
stopbits : array[0..2] of String = ('1','1,5','2');
//---------------------------------------------------------------------------------------------
//--Konstanten zum einfachen Setzen der Portflags----------------------------------------------
dcb_Binary = $00000001; // Binärer Modus - In Windows immer auf 1!
dcb_ParityCheck = $00000002; // Paritätsüberprüfung
dcb_OutxCtsFlow = $00000004; // CTS Flusskontrolle - Sendekontrolle mit Hilfe von CTS
dcb_OutxDsrFlow = $00000008; // DSR Flusskontrolle - Sendekontroll mit Hilfe von DSR
dcb_DtrControlDisable = $00000000; // DTR Flusskontrolle - Schließt DTR auf 0 bei Verbindung und hält es auf 0
dcb_DtrControlEnable = $00000010; // DTR Flusskontrolle - Öffnet DTR auf 1 bei Verbindung und hält es auf 1
dcb_DtrControlHandshake = $00000020; // DTR Flusskontrolle - Handshake-Funktion.
dcb_DtrControlMask = $00000030;
dcb_DsrSensitvity = $00000040; // Zustandsänderung auf DSR überwachen
dcb_TXContinueOnXoff = $00000080; // Stellt ein, ob die Übertragung bei XOff angehalten wird oder nicht
dcb_OutX = $00000100; // Flusskontrolle mit XOn/XOff beim Senden
dcb_InX = $00000200; // Flusskontrolle mit XOn/XOff beim Empfangen
dcb_ErrorChar = $00000400; // Bestimmt, ob Bytes mit falscher Parität durch den Error-Char ersetzt wird.
dcb_NullStrip = $00000800; // Null-Bytes werden beim Empfangen ignoriert
dcb_RtsControlDisable = $00000000; // RTS-Flusskontrolle - Schließt RTS auf 0 bei Verbindung und hält es auf 0
dcb_RtsControlEnable = $00001000; // RTS-Flusskontrolle - Öffnet RTS auf 1 bei Verbindung und hält es auf 1
dcb_RtsControlHandshake = $00002000; // RTS-Flusskontrolle - Handshake-Funktion
dcb_RtsControlToggle = $00003000; // RTS-Flusskontrolle - RTS ist an wenn Bytes zu senden sind, wenn keine zu senden sind ist RTS auf 0
dcb_RtsControlMask = $00003000; // RTS-Flusskontrolle
dcb_AbortOnError = $00004000; // Wenn ein Fehler auftritt, stoppt jede Transmission und der
// Fehler muss mit Hilfe von ClearCommError beseitigt werden.
dcb_Reserveds = $FFFF8000; // Reserviert! Nicht benutzen!
//------------------------------------------------------------------------------------------------------------------------
type TComPort = class
private
PortHandle : Integer; // Handle (u.a. Zeiger) auf den COM-Port.
DCB : TDCB; // Data-Control-Block-Struktur zum Kontrollieren der Parameter der seriellen Schnittstelle
procedure GetDCB;
procedure SetParity (Parity : byte); // Den Modus der Paritätskontrolle:
function GetParity : byte; // 0 = Keine, 1=ungerade, 2=gerade, 3=Merkierung, 4=Leerzeichen
procedure SetBaudRate (Baudrate : Word); // Setzt die Übertragungsgeschwindigkeit des Ports in Baud
function GetBaudrate : Word;
function GetStopBits : byte; // Setzt die Anzahl der Stopbits
procedure SetStopBits (bits : byte); // 0 = 1 Stopbit, 1 = 1.5 Stopbits, 2 = 2 Stopbits
function GetByteSize : byte; // Fragt die Anzhal der Bits/Byte ab.
procedure SetByteSize (bytesize : byte); // Setzt die Anzahl der Bits/Byte (Standard: 8)
public
function OpenCOM (Port : pchar) : Integer; // Öffnet COM-Port (Parameter-Beispiel: 'COM1')
procedure CloseCOM; // Schließt das Handle für den COM-Port
//-------------------------------------------Ausgaben - Indikatoren für angeschlossene Geräte
procedure TXD (State : integer); // TxD = Sendeleitung --> Hier Prozedur für Dauerspannung auf TxD
procedure RTS (State : integer); // "Request-To-Send" --> Computer signalisiert, dass er senden möchte
procedure DTR (State : integer); // "Data-Terminal-Ready" --> Computer ist bereit
//-------------------------------------------Eingaben - Indikatoren für bestimmte Ereignisse.
function CTS : integer; // "Clear-To-Send" --> Dem Computer wird angezeigt,
// dass das angeschlossene Gerät bereit ist Daten zu emfpangen
function DSR : integer; // "Data-Set-Ready" --> Angeschlossenes Gerät ist bereit
function RI : integer; // "Ring-Indicator" --> Klingelzeichen, ähnlich beim Telefon
function DCD : integer; // "Data-Carrier-Detect --> Computer ist bereit Daten zu empfangen
function INPUTS : integer;
//--------------------------------------------------------------------------------------------
function GetHndl : Integer; // Gibt das geöffnete Handle des Ports zurück
//--------------------------------------------------------------------------------------------
function GetFlags : Integer; // Fragt die Port-Flags ab.
function SetFlags (Flag : Integer; Enable : Boolean) : boolean; //Setzt die Port-Flags (siehe weiter oben)
//------------------------------------------Sendefunktionen-----------------------------------
procedure BufferSize (Size : Integer); // Setzt die Größe des Sende- und Empfangspuffers für Zeichenübertragungen
function CharInTXBuffer : Cardinal; // Aktuelle Länge des Sendepuffers
function CharInRXBuffer : Cardinal; // Aktuelle Länge des Empfangspuffers
procedure ClearBuffer; // Sende- und Empfangspuffer werden gelöscht
procedure SENDBYTE (Dat: Integer); // Byte über die serielle Schnittstelle senden
procedure SENDSTRING(Buffer: Pchar); // Text über die serielle Schnittstelle senden
function READBYTE() : Integer; // Byte über die serielle Schnittstelle empfangen
function READSTRING() : Pchar; // Text über die serielle Schnittstelle empfangen
procedure Timeouts (TOut : Integer); // Setzt die Timeouts zum Senden
function GetStatusReport : String; // Gibt einen ausführlich formulierten Statusreport des Ports zurück.
//---------------------------------------------------------------------------------------------
//-------------Eigenschaftsfestsetzungen - zum leichteren Setzen der Porteigenschaften---------
property Parity : byte read GetParity write SetParity;
property BaudRate : Word read GetBaudRate write SetBaudRate;
property StopBits : byte read GetStopBits write SetStopBits;
property ByteSize : byte read GetByteSize write SetByteSize;
//*********************************************************************************************
destructor Destroy; override;
constructor Create (AutoInit : Integer);
//*********************************************************************************************
end;
implementation
constructor TComport.Create (AutoInit : Integer);
begin
case AutoInit of
1 : OpenCOM('COM1');
2 : OpenCOM('COM2');
end; {CASE}
end;
function TComPort.OpenCOM (port : pchar) : Integer;
var
PortStr, Parameter : String;
begin
Result := 0;
// Wenn Port-Handle geöffnet, dann Handle schließen
if PortHandle > 0 then CloseHandle(PortHandle);
// übermittelter COM-Port 'herausfiltern'
Parameter := port;
PortStr := copy(Parameter,1,4);
// COM-Port öffnen
PortHandle := CreateFile (PChar(PortStr), GENERIC_READ or GENERIC_WRITE,
0,nil,OPEN_EXISTING,0,0);
//Status des Ports überprüfen und DCB-Struktur füllen
GetCommState(PortHandle,dcb);
//DCB-Struktur mit Standardwerten füllen
BuildCommDCB(PChar(Parameter),dcb);
//Eigene Flags setzen
DCB.Flags := 1;
//Änderungen auf den Port anwenden und auf Erfolg überprüfen
if SetCommState (PortHandle, DCB) then Result := 1;
end;
procedure TComPort.CloseCOM;
begin
//Port schließen und Handle zurücksetzen (wegen OpenCOM!)
GetCommState(PortHandle,dcb);
SetParity(0);
SetBaudrate(1200);
SetStopBits(0);
SetByteSize(8);
SetCommState(PortHandle,dcb);
CloseHandle(PortHandle);
PortHandle := 0;
end;
procedure TComport.TXD (State: Integer); //TxD bei 0 auf Sendemodus stellen, bei 1 auf Dauerspannung (Sendebetrieb nicht möglich)
begin
if State=0 then
EscapeCommFunction(PortHandle,CLRBREAK)
else
EscapeCommFunction(PortHandle,SETBREAK);
end;
procedure TComPort.RTS (State:Integer); //RTS entweder auf 0 oder auf 1 setzen
begin
if State=0 then
EscapeCommFunction(PortHandle,CLRRTS)
else
EscapeCommFunction(PortHandle,SETRTS);
end;
procedure TComPort.DTR (State : integer); //DTR entweder auf 0 oder 1 setzen
begin
if State = 0 then
EscapeCommFunction(PortHandle,CLRDTR)
else
EscapeCommFunction(PortHandle,SETDTR);
end;
function TComPort.CTS : Integer; //CTS auf Status abfragen
var
mask : DWord;
begin
GetCommModemStatus(PortHandle,mask);
if (mask and MS_CTS_ON) = 0 then
result := 0
else
result := 1;
end;
function TComPort.DSR : Integer; // DSR auf Status abfragen
var
mask : DWord;
begin
GetCommModemStatus(PortHandle,mask);
if (mask and MS_DSR_ON) = 0 then
result := 0
else
result := 1;
end;
function TComPort.RI : Integer; // RI auf Status abfragen
var
mask : DWord;
begin
GetCommModemStatus(PortHandle,mask);
if (mask and MS_RING_ON) = 0 then
result := 0
else
result := 1;
end;
function TComPort.DCD : Integer; // DCD auf Status abfragen
var
mask : DWord;
begin
GetCommModemStatus(PortHandle,mask);
if (mask and MS_RLSD_ON) = 0 then
result := 0
else
result := 1;
end;
function TComPort.Inputs : Integer;
var
mask : DWord;
begin
GetCommModemStatus(PortHandle,mask);
result := (mask div 16) and 15;
end;
function TComPort.GetHndl : integer;
begin
result := PortHandle;
end;
procedure TComPort.SetParity (Parity : byte);
begin
if (PortHandle > 0) and (Parity in [0..4]) then
begin
GetDCB;
DCB.Parity := Parity;
windows.SetCommState(PortHandle,DCB)
end;
end;
function TComport.GetParity : byte;
var
temp : TDCB;
begin
if (PortHandle > 0) then
begin
GetCommState(PortHandle,temp);
result := temp.Parity;
end
else
result := 255;
end;
function TComport.GetBaudrate : Word;
var
temp : TDCB;
begin
if (PortHandle > 0) then
begin
GetCommState(PortHandle,temp);
result := temp.BaudRate;
end
else
result := 0;
end;
procedure TComPort.SetBaudRate(Baudrate : Word);
begin
if (PortHandle > 0) then
begin
GetCommState(PortHandle,DCB);
DCB.BaudRate := Baudrate;
SetCommState(PortHandle,DCB)
end;
end;
function TComPort.GetFlags : Integer;
var
temp : TDCB;
begin
if (PortHandle > 0) then
begin
GetCommState(PortHandle,temp);
result := temp.Flags;
end
else
result := -1;
end;
function TComport.GetStopBits : byte;
var
temp : TDCB;
begin
if (PortHandle > 0) then
begin
GetCommState(PortHandle,temp);
result := temp.StopBits;
end
else
result := 255;
end;
procedure TComport.SetStopBits(bits : byte);
begin
if (bits > 0) and (bits //Sende -und Empfangspuffer setzen
begin
SetupComm(PortHandle,Size,Size);
end;
function TComport.CharInTXBuffer : Cardinal; // Zeigt die aktuele Anzahl an Bytes im Sendepuffer an.
var
Comstat : _Comstat;
Errors : DWord;
begin
if windows.ClearCommError(PortHandle,Errors,@Comstat) then
result := Comstat.cbOutQue else result := 0;
end;
function TComport.CharInRXBuffer : Cardinal; // Zeigt die aktuelle Anzahl an Bytes im Sendepuffer an.
var
Comstat : _Comstat;
Errors : DWord;
begin
if windows.ClearCommError(PortHandle,Errors,@Comstat) then
result := Comstat.cbInQue else result := 0;
end;
procedure TComport.ClearBuffer; // Alle Puffer sofort leeren. Alle noch zu sendenden bzw zu empfangenden Zeichen gehen verloren!
begin
windows.PurgeComm(PortHandle,PURGE_TXCLEAR);
windows.PurgeComm(PortHandle,PURGE_RXCLEAR);
end;
procedure TComport.SENDBYTE (Dat: Integer); // Ein einzelnes Byte (binär codiert) senden
var BytesWritten: DWord;
begin
WriteFile(PortHandle,Dat,1,BytesWritten,NIL);
END;
function TComport.READBYTE(): Integer; // Einen einzelnes Byte (binär codiert) empfangen
var Dat: Byte;
BytesRead: DWORD;
begin
ReadFile(PortHandle,Dat,1,BytesRead,NIL);
if BytesRead = 1 then Result:=Dat else Result := -1;
end;
procedure TComport.SENDSTRING (Buffer: Pchar); // Einen Character senden.
var BytesWritten: DWord;
begin
WriteFile(PortHandle,Buffer^,Length(Buffer),BytesWritten,NIL);
END;
function TComport.READSTRING(): Pchar; // Einen Character empfangen
var Dat: Integer;
Data: STRING;
begin
Dat := 0;
while ((Dat > -1) and (Dat 13)) do begin
Dat := ReadByte();
if ((Dat > -1) and (Dat 13)) then Data := Data + Chr(Dat);
end;
result := pchar(Data);
end;
destructor TComport.Destroy;
begin
if PortHandle > 0 then
CloseCom;
inherited;
end;
procedure Tcomport.Timeouts (TOut : Integer); // Setzen der Sendetimeouts
var
Timeout : TCommTimeOuts;
begin
TimeOut.ReadIntervalTimeout := 1;
TimeOut.ReadTotalTimeoutMultiplier := 1;
TimeOut.ReadTotalTimeoutConstant := TOut;
TimeOut.WriteTotalTimeoutMultiplier := 10;
TimeOut.WriteTotalTimeoutConstant := TOut;
SetCommTImeouts(PortHandle,Timeout);
end;
procedure TComport.GetDCB;
begin
GetCommState(PortHandle,DCB);
end;
function TComport.SetFlags (Flag : Integer; Enable : Boolean) : boolean; // Setzt spezielle Einstellungen des Ports
begin
GetDCB;
if Enable then
DCB.Flags := DCB.Flags or Flag
else
DCB.Flags := DCB.Flags and (not Flag);
result := Boolean(SetCommState(PortHandle,DCB));
end;
function TComport.GetStatusReport : String;
var
Str : String;
begin
Str := 'Baudrate von COM1: ' + IntToStr(Baudrate);
//Str := Str + chr(13) + 'Parität von COM1: ' + parity[Parity];
Str := Str + chr(13) + 'Flags von COM1: ' + IntToStr(GetFlags);
Str := Str + chr(13) + 'Bits/Byte von COM1: ' + IntToStr(ByteSize);
//Str := Str + chr(13) + 'Stopbits von COM1: ' + stopbits[StopBits];
Str := Str + chr(13) + 'Zeichen im RX-Puffer: ' + IntToStr(CharInRXBuffer);
Str := Str + chr(13) + 'Zeichen im TX-Puffer: ' + IntToStr(CharInTXBuffer);
result := Str;
end;
end.
Download
TCOMPort mit kleinem Testprogramm zum Downloaden
Darstellung des Sendens von Bits mit Hilfe eines Oszillographen
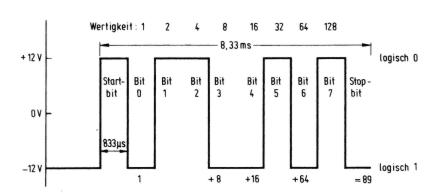
Zu Anfang der Übertragung eines Bytes wird zuerst ein Startbit gesendet, dass, wie der Name es schon sagt, den Beginn einer einzelnen Übertragung an. Nach diesem Startbit folgen bis zu 8 weitere Bits in denen dann die Daten übertragen werden. Diese 7 Bits können entweder auf 1 oder auch auf 0 gesetzt werden (neg. Spannung, pos.Spannung) und können damit nach der ASCII Tabelle binär codierte Zeichen übertragen. Am Ende dieser 7 Bits folgt das Stoppbit, dass das Ende des übertragenen Bytes darstellen soll. Dieses Stoppbit ist immer auf 1 gesetzt und kann ent weder 1 oder auch 2 Bits umfassen.
Hier einige Oszillographendarstellungen:
Einige Beispiele für binär codierte Zeichen.

x entspricht nach der ASCII 120. 12010 = 11110002

A entspricht nach der ASCII 65 . 6510 = 10000012

Darstellung der binären Ziffer 1

Darstellung der binären Ziffer 10 = 210
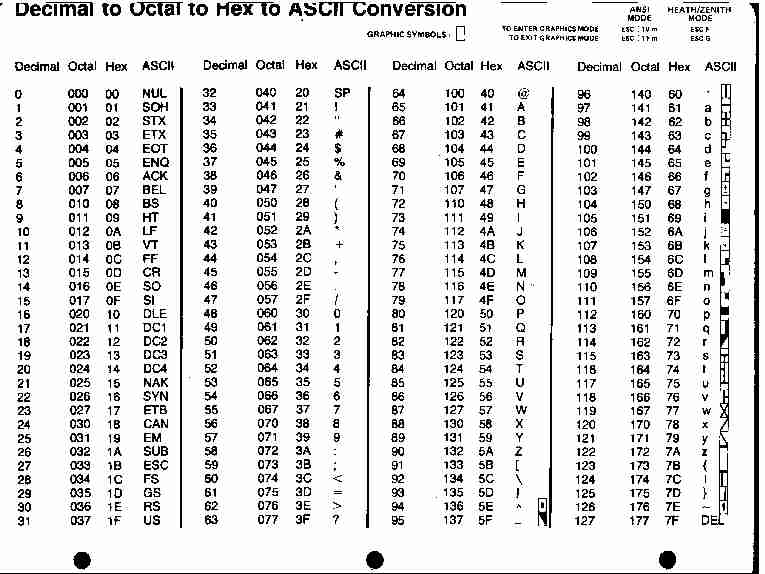
Die ASCII-Tabelle: